MacroFab Blog
This week’s featured board comes from Paul Pounds, a senior lecturer at the University of Queensland. Paul has designed the driver board for the “iRat” (intelligent Rat Animat Technology) as a tool for studies in embodied cognition, and neuroscience research.
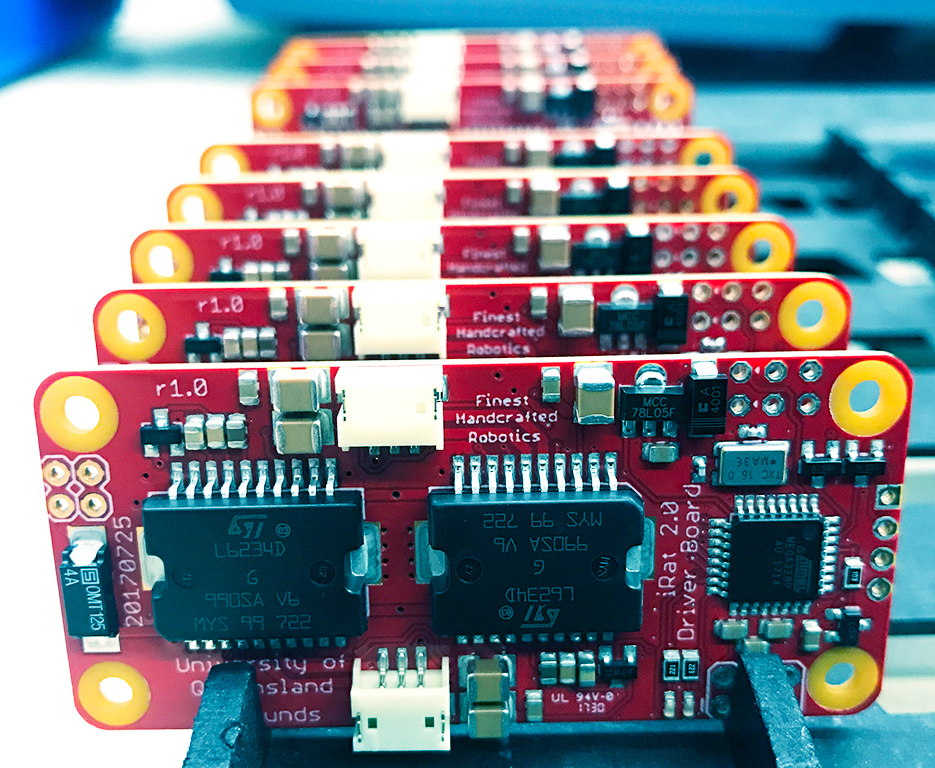
Comparable to the standard Pioneer DX robots, the iRat’s volume is a bit smaller with approximately 0.08 square meters and a mass of 0.5 kilograms. The main control input comes in the form of a UART port and is powered by two cell lipo batteries. The board uses two L6234 and three phase motor drivers connected to an Atmega 328 that provides 5V and 3.3V onboard for driving various parts that allow easier up/down movements to the 3.3V logic of the UART input. To facilitate the value of the platform to a broader range of researchers, the robot uses a Robot-Operating-System frameworks, and C/C++, Python, and MATLAB APIs that have been tested in real time. The iRat also contains a 1 GHz x86 computer, and a LCD navigation pad interface with visual, odometry, and proximity sensors to study neural simulation and robotic navigation. This project is funded by the Temporal Dynamics of Learning Center (TDLC), with collaboration between neuroscientists at UC San Diego and engineers at the University of Queensland.
Thanks to Paul Pounds and Janet Wiles for their contribution to this week’s post!
About MacroFab
MacroFab offers comprehensive manufacturing solutions, from your smallest prototyping orders to your largest production needs. Our factory network locations are strategically located across North America, ensuring that we have the flexibility to provide capacity when and where you need it most.
Experience the future of EMS manufacturing with our state-of-the-art technology platform and cutting-edge digital supply chain solutions. At MacroFab, we ensure that your electronics are produced faster, more efficiently, and with fewer logistic problems than ever before.
Take advantage of AI-enabled sourcing opportunities and employ expert teams who are connected through a user-friendly technology platform. Discover how streamlined electronics manufacturing can benefit your business by contacting us today.